Observation Spaces
Overview
Observation spaces in Griddly are highly configurable. In addition to providing pixel-based and vector-based states of environments, Griddly also provides methods of accessing semantic information about the game state itself, such as state data and event history. For pixel and vector-based representations Griddly provides different observers.
What is an Observer?
An observer in Griddly converts the state of an environment to something that is consumable by a machine learning algorithm. It effectively creates the observations. In Griddly there are many different options for creating observations. This page will outline how all of these methods can be used.
Every environment in Griddly has at least two configurable observers; the player observer(s) and the global observer.
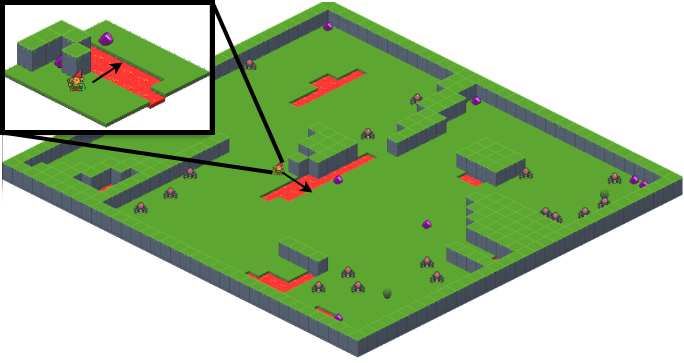
The “Spider Nest” environment with an isometric player observer (inset) and isometric global observer configured.
The player observer(s) are what the agent in the environment sees. The agent might be able to see only a small area around itself (this is known as egocentric partial observability), or it might be able to see the entire environment.
The global observer always gives a view of the entire environment regardless of the number of players and and size of the environment.
Both observers have a standard OpenAI Gym observation space which can be accessed with env.observation_space describing the player observation space and env.global_observation_space describing the global observation space.
Single Agent Observations
The observations for environments where a single avatar is being controlled are returned in the following way:
obs = env.reset()
# obs = np.array([ ... ]) # Player observation
obs, reward, done, info = env.step( ... )
# obs = np.array([ ... ]) # Player observation
Multi-Agent Observations
When there are multiple agents in an environment the env.reset(...) and env.step(...) functions will return the observations of all the of agents as an array of np.array objects. Each observation in the array will be consistent with the shape of env.observation_shape.
As an example in an environment with 2 players, the result of env.reset(...) and env.step(...) will be:
obs = env.reset()
# obs = [
# np.array([ ... ]), # Player 1 observation
# np.array([ ... ]) # Player 2 observation
# ]
obs, reward, done, info = env.step([ ... ])
# obs = [
# np.array([ ... ]), # Player 1 observation
# np.array([ ... ]) # Player 2 observation
# ]
The global observer can also be returned in the env.reset() function by setting the global_observations parameter to True. In this case a dictionary is returned with the global and player keys for both observation types.
obs = env.reset(global_observations=True)
# obs = {
# 'global': np.array([ ... ]), # Global observation
# 'player': [
# np.array([ ... ]), # Player 1 observation
# np.array([ ... ]) # Player 2 observation
# ]
# }
Pixels
Note
For pixel-based observers, each object must define how it should be rendered with an Observer Configuration
The observer type can be chosen when creating the environment with gym.make()
env = gym.make(
'GDY-MyEnvironmentName-v0',
player_observer_type=XXX,
global_observer_type=YYY
...
)
The options for both the player_observer_type and global_observer_type are given below.
- gd.ObserverType.BLOCK_2D
Renders sprites defined by the GDY object Block2D descriptions.
- gd.ObserverType.SPRITE_2D
Renders sprites defined by the GDY object Sprite2D descriptions.
- gd.ObserverType.ISOMETRIC
Renders sprites defined by the GDY object Isometric descriptions.

Vector
Vector observers will return a tensor of shape [objects, player ids, object_rotation, variables, width, height] where each value is either 0 or 1 denoting that there is an object of that type in a particular location.
The data contained in the cell can be configured using the vector options in the GDY observer configuration.
- Objects
Each cell always contains a multi-label representation of whether an object is present (1) in that cell or not (0).
The order of the object index in each [x,y] location can be retrieved by calling env.game.get_object_names().
- IncludePlayerId
If this option is set, each cell of the observation tensor also contains a one-hot representation of which player an object belongs to.
Warning
In multi-agent scenarios, every agent sees themselves as player 1.
- IncludeRotation
This option appends a one-hot to the cell representing the rotation of the object at that position.
- IncludeVariables
If set, the local variables of each object are provided. The order of the variables can be retrieved by calling
env.game.get_object_variable_names()
As an example, in an 5x5 environment that has three types of object: avatar, wall and goal and no other options are set:
obs_shape = env.observation_space.shape
# obs_shape == (3,5,5)
obs, reward, done, info = env.step( ... )
# obs = [
[ # avatar in these locations
[0,0,0,0,0],
[0,1,0,0,0],
[0,0,0,0,0],
[0,0,0,0,0],
[0,0,0,0,0]
],
[ # wall in these locations
[1,1,1,1,1],
[1,0,0,0,1],
[1,0,0,0,1],
[1,0,0,0,1],
[1,1,1,1,1]
],
[ # goal in these locations
[0,0,0,0,0],
[0,0,0,0,0],
[0,0,0,0,0],
[0,0,0,1,0],
[0,0,0,0,0]
]
]
Semantic State
A breakdown of the entire environment including internal variable values that the objects may have can be recovered using env.get_state().
- env.get_state()
This function will return data in the following format:
{ 'GameTicks': 1, 'GlobalVariables': {}, 'Objects': [ { 'Name': 'avatar', 'Location': [1, 3], 'Orientation': 'NONE', 'PlayerId': 1, 'Variables': { '_y': 3, '_playerId': 1, '_x': 1 } }, { 'Name': 'goal', 'Location': [1, 3], 'Orientation': 'NONE', 'PlayerId': 1, 'Variables': { '_y': 3, '_playerId': 1, '_x': 1 } }, { ... } ] }
Event History
Event history in Griddly contains all the information about actions that have been made by the player, any internal actions that have been executed by any game mechanics, or any delayed actions that have been performed.
Event history is gathered during env.step() and returned in the info['History'] variable, but it must be enabled first.
To enable event history, env.enable_history(True) can be called after gym.make()
The format of event history looks like this:
[
{
'PlayerId': 1,
'ActionName': 'move',
'Tick': 0,
'Reward': 0,
'Delay': 0,
'SourceObjectName': 'avatar',
'DestinationObjectName': '_empty',
'SourceObjectPlayerId': 1,
'DestinationObjectPlayerId': 0,
'SourceLocation': [2.0, 3.0],
'DestinationLocation': [1.0, 3.0]
},
{
'PlayerId': 1,
'ActionName': 'move',
'Tick': 0,
'Reward': 0,
'Delay': 0,
'SourceObjectName': 'ball',
'DestinationObjectName': '_empty',
'SourceObjectPlayerId': 1,
'DestinationObjectPlayerId': 0,
'SourceLocation': [1.0, 3.0],
'DestinationLocation': [0.0, 3.0]
},
...
]